Сенсоры частоты вращения постоянно передают сигналы с информацией о скорости вращения каждого колеса. Сенсор поворота рулевого колеса единственный из сенсоров передает данные непосредственно через CAN-Bus на устройство управления. Совокупность названных данных позволяет рассчитать заданное направление движения и оптимальные ходовые характеристики автомобиля.
Сенсор поперечного ускорения «предупреждает» устройство управления о боковых смещениях, сенсор частоты вращения - о возможных пробуксовках. По этим данным определяется актуальное состояние автомобиля.
Если эти две характеристики не совпадают, высчитывается степень необходимого вмешательства.
ESP «решает»:
- какому колесу должно быть сообщено замедление и в какой степени,
- должен ли быть снижен крутящий момент двигателя,
- в случае автоматической коробки передач должно ли быть оказано воздействие на управление коробкой передач.
Затем система проверяет по показаниям датчиков, успешно ли было осуществлено воздействие: При положительном результате воздействие прекращается, и продолжается наблюдение за ходом автомобиля.
При отрицательном - автоматическое регулирование продолжается.
В случае осуществления воздействия на управление системами автомобиля водитель узнает об этом по миганию сигнала ESP.
Датчик поперечного ускорения G200
В соответствии с законами физики данный датчик должен находиться как можно ближе к центру тяжести автомобиля.
Назначение
G200 передает данные о распределении боковых сил, действующих на автомобиль и стремящихся изменить желаемую траекторию движения.
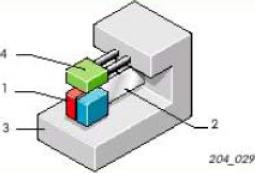
Устройство
В упрощенном виде датчик поперечного ускорения состоит из постоянного магнита (1), пружины (2), демпферной пластинки (3) и датчика Холла (4).
Постоянный магнит, пружина и демпфер составляют магнитную систему. Магнит прочно соединен с пружиной и может качаться над демпферной пластиной.
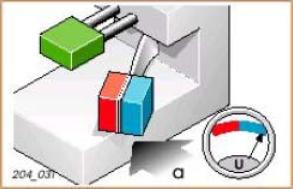
Функции
Когда на автомобиль действует поперечное ускорение (а), постоянный магнит, в силу своей инертности, повторяет возникшее движение с запозданием. То есть демпферная пластинка и сенсор двигаются вместе с корпусом автомобиля, тогда как магнит еще момент времени остается неподвижен.
Вследствие этого движения в демпферной пластинке возникают электрические вихревые токи,образующие встречно вращающийся по отношению к магниту полю поток. Таким образом, сила общего магнитного поля уменьшается. Это вызывает изменение напряжения в датчике Холла (U). Изменение напряжения пропорционально силе поперечного ускорения.
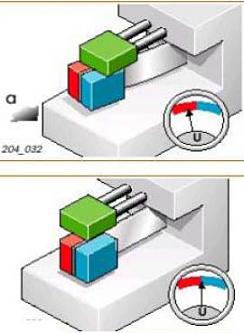
Это означает, что чем сильнее различаются движения магнита и пластинки, тем больше ослабляется магнитное поле и заметнее меняется напряжение Холла. При отсутствии поперечного ускорения напряжение Холла остается постоянным.






Сообщение от dimit59



 Ответить с цитированием
Ответить с цитированием


 это уже пустые споры
это уже пустые споры



